URDF
URDF stands for ‘Unified Robot Description Format’. The Unified Robot Description Format (URDF) is an XML specification to describe a robot. We attempt to keep this specification as general as possible, but obviously the specification cannot describe all robots. The main limitation at this point is that only tree structures can be represented, ruling out all parallel robots. Also, the specification assumes the robot consists of rigid links connected by joints; flexible elements are not supported. The specification covers:
- Kinematic and dynamic description of the robot
- Visual representation of the robot
- Collision model of the robot
how URDF is written
- XML formatTags:
- Tags like Robot link, joint,transmission, … etc
- Kinematic tree structure
- Order in the file does not matter
Lets Explore URDF files and tags
The URDF see URDF file for below Robot
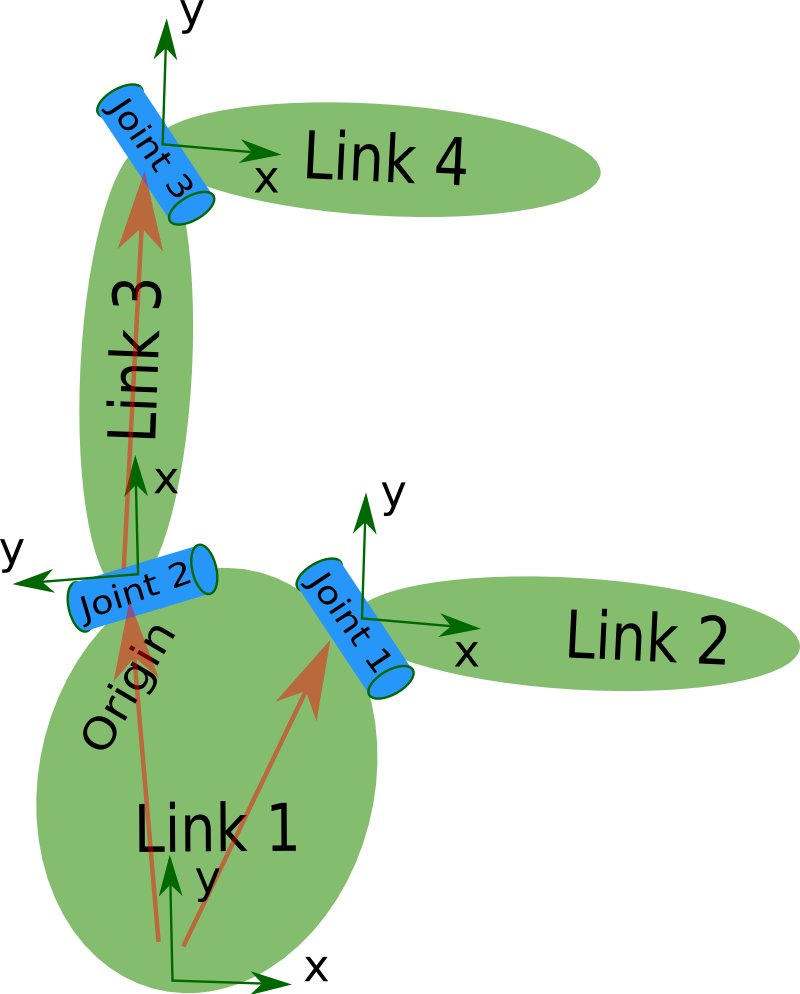
A typical xml file for the Robot ‘test.urdf’
test.urdf
<?xml version="1.0" encoding="UTF-8"?>
<robot name="test_robot">
<link name="link1" />
<link name="link2" />
<link name="link3" />
<link name="link4" />
<joint name="joint1" type="continuous">
<parent link="link1"/>
<child link="link2"/>
<origin xyz="5 3 0" rpy="0 0 0" />
</joint>
<joint name="joint2" type="continuous">
<parent link="link1"/>
<child link="link3"/>
<origin xyz="-2 7 0" rpy="0 0 0" />
</joint>
<joint name="joint3" type="continuous">
<parent link="link3"/>
<child link="link4"/>
<origin xyz="5 0 0" rpy="0 0 -1.57" />
</joint>
</robot>
you can run
rosrun urdfdom_py display_urdf ~/ROS_Worksop/src/rosbasics/urdf/test.urdf
which outputs
gazebos: []
joints:
- {axis: None, calibration: None, child: link2, dynamics: None, limit: None, mimic: None,
name: joint1, origin: None, parent: link1, safety_controller: None, type: continuous}
- {axis: None, calibration: None, child: link3, dynamics: None, limit: None, mimic: None,
name: joint2, origin: None, parent: link1, safety_controller: None, type: continuous}
- {axis: None, calibration: None, child: link4, dynamics: None, limit: None, mimic: None,
name: joint3, origin: None, parent: link3, safety_controller: None, type: continuous}
links:
- collisions: []
inertial: None
name: link1
origin: None
visuals: []
- collisions: []
inertial: None
name: link2
origin: None
visuals: []
- collisions: []
inertial: None
name: link3
origin: None
visuals: []
- collisions: []
inertial: None
name: link4
origin: None
visuals: []
materials: []
name: test_robot
transmissions: []
version: '1.0'
As said urdf is the stadard used to represent robot structue we need to have urdf xml praser in our system which can be enabled by
sudo apt install liburdfdom-tools
and afer install
urdf_to_graphiz ~/ROS_Worksop/src/rosbasics/urdf/test.urdf
which out puts
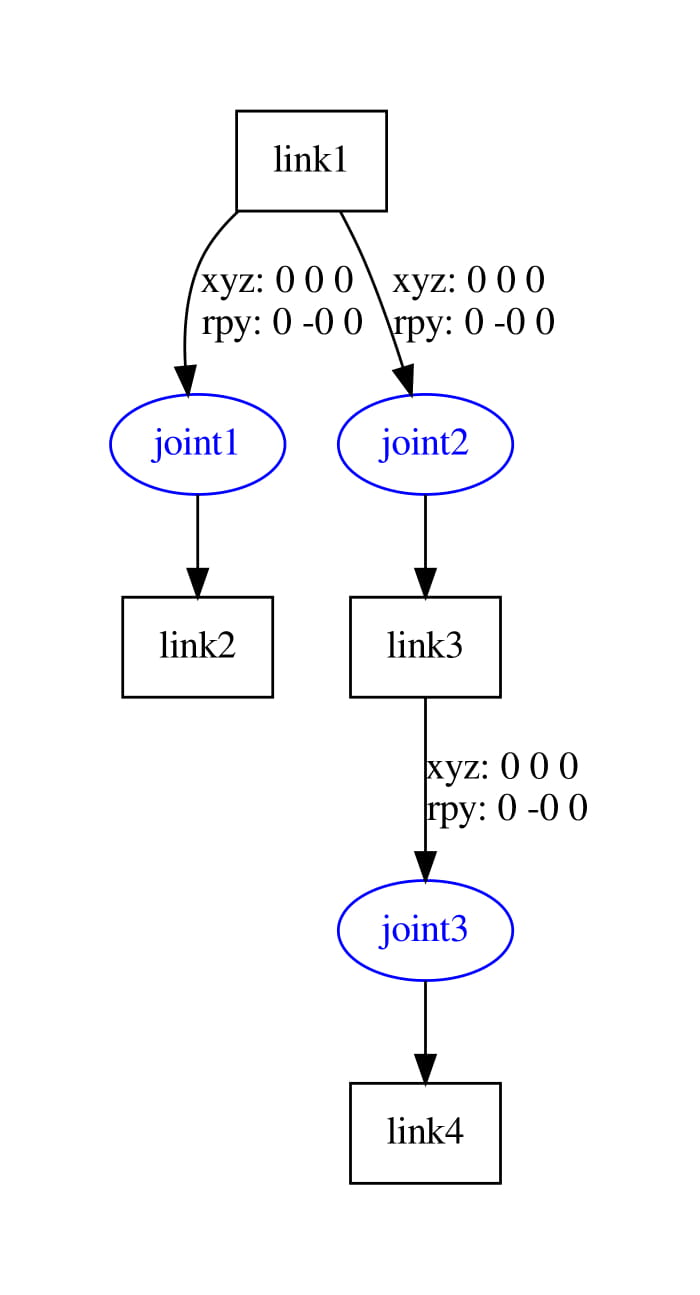
all dimetions are in SI units and base_link frame of Myfirst robot
NOTE
A Robot discription without dimensions is meaniningless lets add dimentions
Create A launch file
ROS has splitted a package as useage increased joint_state_publisher to ‘joint_state_publisher_gui’ to install it
sudo apt-get update sudo apt-get install ros-melodic-joint_state_publisher_gui
‘urdf.launch’
<?xml version="1.0" encoding="UTF-8"?>
<launch>
<arg name="model" default="box.urdf" />
<arg name="file" default="$(find rosbasics)/urdf/$(arg model)"/>
<arg name="gui" default="false" />
<param name="robot_description" command="$(find xacro)/xacro --inorder $(arg file)" />
<param name="use_gui" value="$(arg gui)"/>
<node name="joint_state_publisher" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
</launch>
Lets create shapes
BOX
box.urdf
<?xml version="1.0" encoding="UTF-8"?>
<robot name="box">
<link name="base_link">
<visual>
<geometry>
<box size= "1 1 1"/>
</geometry>
</visual>
</link>
</robot>
CYLINDER
cylinder.urdf
<?xml version="1.0" encoding="UTF-8"?>
<robot name="cylinder">
<link name="base_link">
<visual>
<geometry>
<cylinder radius="1.0" length="3"/>
</geometry>
</visual>
</link>
</robot>
- open terminal
roslaunch roslaunch roslaunch rosbasics urdf.launch model:=box.urdf